Virtual Prototyping
Virtual Prototyping
I'm a paragraph. Click here to add your own text and edit me. It's easy.
I'm a paragraph. Click here to add your own text and edit me. It's easy.
Tracking Control of Robot Manipulator
Built-in PID Control

Add-on ILC

With the construction of data-based learning filter from simple experiments using impulsive motion input, add-on Iterative Learning Control (ILC) reduces the tracking error by more than an order of magnitude.
Related publications
-
Lee, Yu-Hsiu, et al. "A Nested-Loop Iterative Learning Control for Robot Manipulators." IFAC-PapersOnLine 52.15 (2019): 358-363.
-
Lee, Yu-Hsiu, et al. "Industrial robot accurate trajectory generation by nested loop iterative learning control." Mechatronics 74 (2021): 102487.
Data-Driven Iterative Learning Control of Nonlinear Systems
Simulation

Experiment

Utilizing adaptive filter that implicitly identifies the time-varying inverse system along the trajectory being tracked, the filtered error through the copied inversion generates effective control correction and results in a fast converging ILC.
Related publications
-
Lee, Yu-Hsiu, and Tsu-Chin Tsao. "Data-driven ILC for trajectory tracking in nonlinear dynamic systems." Dynamic Systems and Control Conference. Vol. 59155. American Society of Mechanical Engineers, 2019.
-
Lee, Yu-Hsiu, Sandeep Rai, and Tsu-Chin Tsao. "Data-Driven Iterative Learning Control of Nonlinear Systems by Adaptive Model Matching." IEEE/ASME Transactions on Mechatronics (2022).
Frequency Domain Adjoint-Based Iterative Learning Control for MIMO Systems
Two-by-Two System Example

Experiment
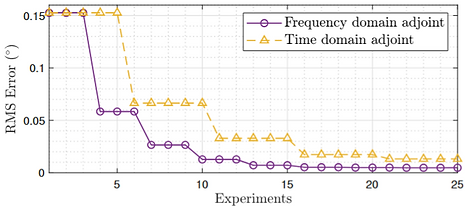
Conventional data-driven adjoint-based iterative learning control (ILC) requires conducting a number of dedicated experiments equal to the product of the input channels and output channels. Additionally, the maximum learning gain is limited by the system's peak gain. This work approaches the problem from frequency domain so the number of experiments can be reduced; moreover, the learning gain can be frequency-dependent so as to expedite ILC convergence at various frequencies.
Related publications
-
Lee, Yu-Hsiu, and Wei-Yi Chou. "Frequency Domain Adjoint-Based Iterative Learning Control for MIMO Systems." ASME Letters in Dynamic Systems and Control (2024): 1-9.
Data-Driven Iterative Learning Control of Linearized Multivariate Systems
H-Type Dual Drive Gantry Platform

Error Propagation

With the aid of multi-channel adaptive filters, multivariate time-varying inverse of the linearized system can be used for effective error filtering, thus resulting in fast tracking error convergence. The distinction between left and right inverses of multivariate systems is investigated to prmote fast error convergence.
Related publications
-
Lee, Yu-Hsiu, et al. "Data-driven iterative learning control for nonlinear multivariate systems using transpose adaptive filtering." European Journal of Control 85 (2025): 101273.