Virtual Prototyping
Virtual Prototyping
I'm a paragraph. Click here to add your own text and edit me. It's easy.
I'm a paragraph. Click here to add your own text and edit me. It's easy.
Hybrid Parallel-Serial Tool Exchange Robot for Ophthalmic Precision Surgery I (HYPEROPS-I)
Computer-Aided Design
Physical Prototype

By combining two five-bar mechanism at different heights, a precision ophthalmic robot with software-controlled remote center of motion is realized. The palm-size robot features remote actuation for the angulation, and a passive tool cartridge with magnetic coupling is designed for quick tool exchange.
Intuitive Kinematic Mapping
Software-Controlled Remote Center of Motion

The robot's design enables intuitive kinematic mapping that closely replicates the posture of a human hand. It achieves full six degrees of freedom in space through two five-bar linkages operating on separate planes, combined with insertion and tool rotation. Additionally, a software-controlled remote center of motion (RCM) can be implemented using virtual fixture techniques.
Related publications
-
Yung-Chen Wu, et al. "A Palm-Sized Anthropomorphic Parallel-Serial Robot for Ophthalmic Surgery." 2024 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM).
Hybrid Parallel-Serial Tool Exchange Robot for Ophthalmic Precision Surgery II (HYPEROPS-II)
Computer-Aided Design
3D Printing Prototype

HYPEROPS-II streamlines end-effector design by integrating a precision linear piezo stage and a tool exchange mechanism akin to a hydraulic chuck. The overall robot size is further reduced, and its counter-gravity capability is enhanced by reorienting the drive motors and employing worm gear transmissions.
Related publications
-
Yu-An Chen, et al. "Miniaturization of a Dexterous Anthropomorphic Robot Manipulator for Ophthalmic Surgery." 10th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2025).
A Spherical Mechanism Featuring Distal Actuation and Tool Exchange
Driving Bowden Cable Sub-assembly

Physical Prototype

The spherical platform incorporates a remote center of motion (RCM), making it well-suited for minimally invasive surgery. Its low inertia is achieved by transmitting actuation power to the end effector through a Bowden cable mechanism, keeping the motors distal from the tool. Tool exchange is facilitated through passive geometric constraints and magnetic coupling, enabling quick and reliable reconfiguration.
Related publications
-
Ching Chou, Yu-Wei LIn, et al. "A Spherical Mechanism Featuring Distal Actuation and Tool Exchange." 10th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2025).
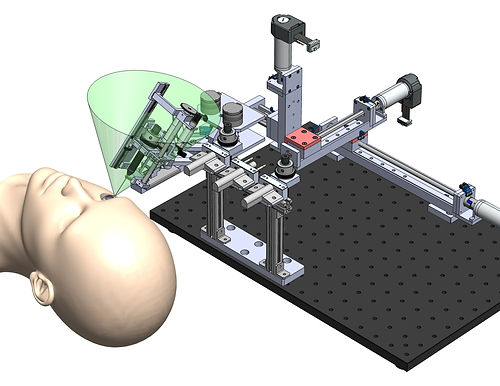
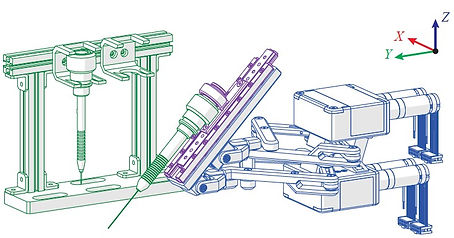
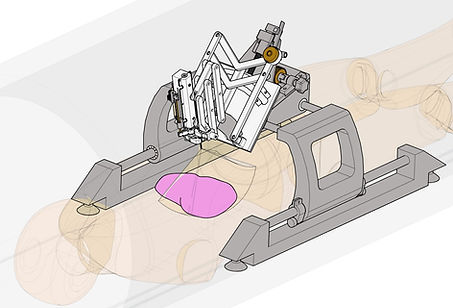
An MRI Compatible Robotic System for Abdominal Intervention
Driving Bowden Cable Sub-assembly
Physical Prototype
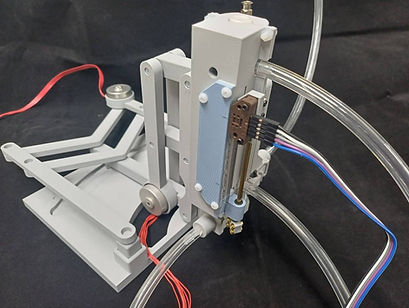
This study presents an MRI-compatible robotic system that incorporates a decoupled, parallelogram-based Remote Center of Motion (RCM) mechanism for precise needle angulation within a compact footprint. A pneumatically actuated needle insertion module employing inchworm motion overcomes stroke length limitations, while a compliant gripper enables secure yet adaptable needle handling.
Related publications
-
Hsueh-Yu Chen, et al. "An MRI Compatible Robotic System for Abdominal Intervention." 10th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2025).
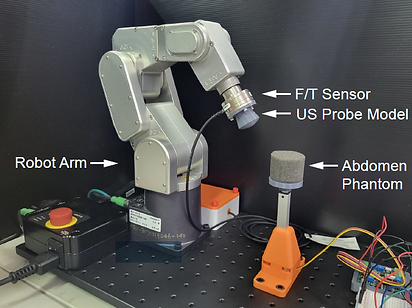
Robot-Assisted Ultrasound Probe Force Control
Experimental Setup
Adaptive Feedback Control under Normal Breathing
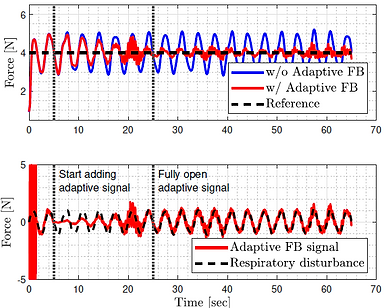
A 6-DOF serial robot is utilized to assist in maintaining constant contact force between the ultrasound probe and the abdomen, despite respiration-induced disturbances, to ensure image quality during ultrasound-guided surgical procedures. Adaptive filtering techniques are exploited to account for structured disturbances in human breathing.
Related publications
-
Kai-Shiang Yuan, et al. " Robot-Assisted Ultrasound Probe Force Control Under Respiration-Induced Motion." 2024 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM).